Encoder Uwendungen / Logistik Industrie
Encoder fir Logistik Induktiounen
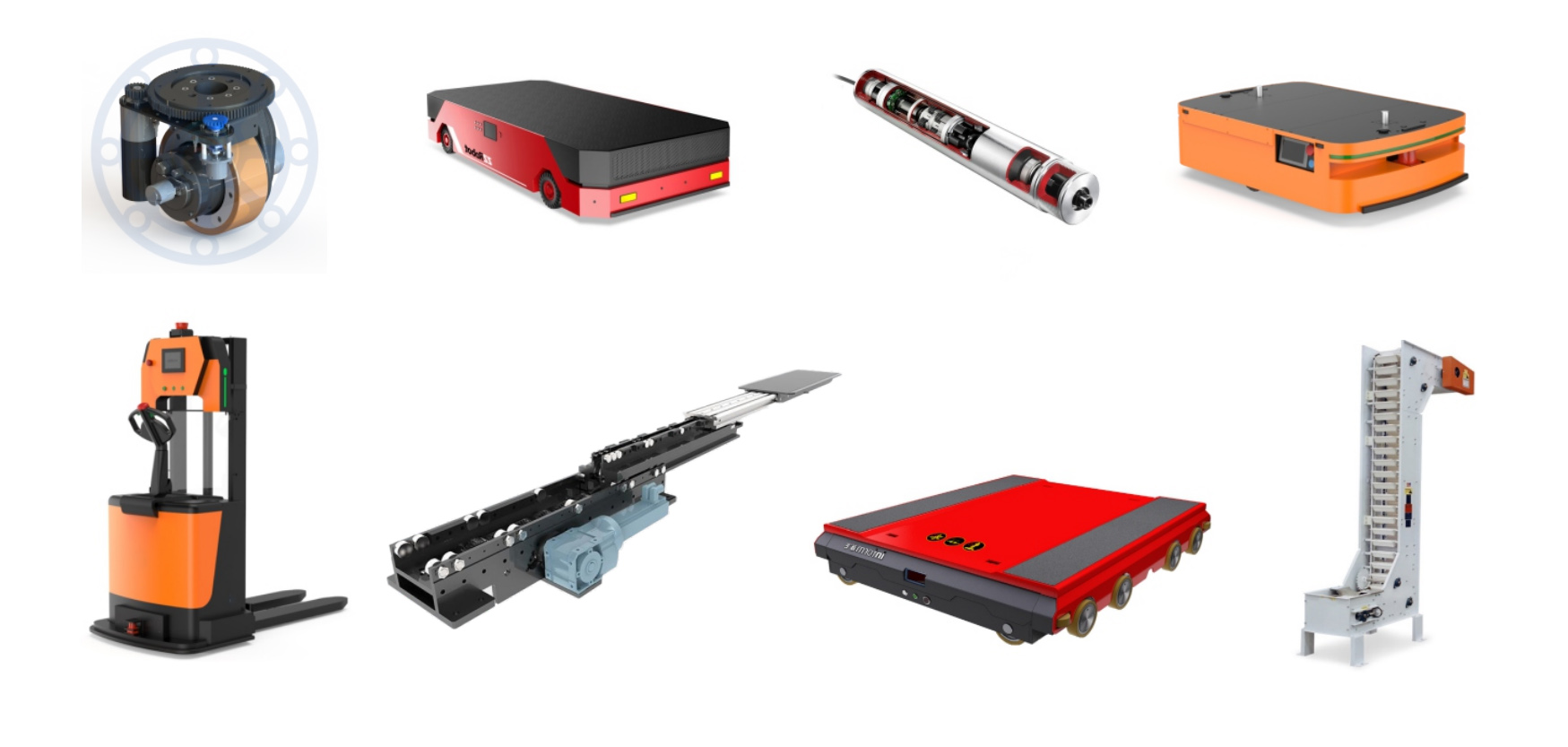
Mat der Entwécklung vun Automatisatioun an onbemannt dreiwend Technologie, goufen verschidden automatiséiert Logistik Equipement wäit an der Logistik Industrie benotzt; Adike Encoder si verschidde automatiséiert Logistikausrüstung, sou wéi: onbemannt Forklifts, Hoists, Teleskopgabelen, Roller Motoren, Lenkrad, Shuttle Autoen, AGV Trolleys, schwéier Pflicht AGVs an aner Ausrüstung liwweren Geschwindegkeets Iwwerwaachung, Eck Iwwerwaachung, Distanz Iwwerwaachung an aner Léisungen fir déi sécher, séier a korrekt Operatioun vu verschiddenen Automatisatiounsausrüstung ze garantéieren, doduerch déi verschidde Bestellungen ofgeschloss, déi vum System Task-Instruktioune erausginn.
Encoder an der Logistik Industrien:
1.Multi-Tour absolute Encoder;
2.Solid Shaft Incremental Encoder;
3.Through Huel Schacht Inkrementell Encoder;
4.Draw Wire Encoder;
Uwendung vun Encoder op AGV a Lenkrad Zweck
Mooss d'Fuergeschwindegkeet vum AGV Gefier an de Lenkwinkel beim dréien;
Mess de Lenkwinkel vum Lenkrad; Virdeeler: kleng Gréisst, héich Präzisioun, gutt Stabilitéit, a Käschten-effikass. Encoder Auswiel: Multi-Tour absolute Encoder; Optional Kommunikatiounsprotokoll: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI
Recommandéiert Modell: GSA-38L6 Serie
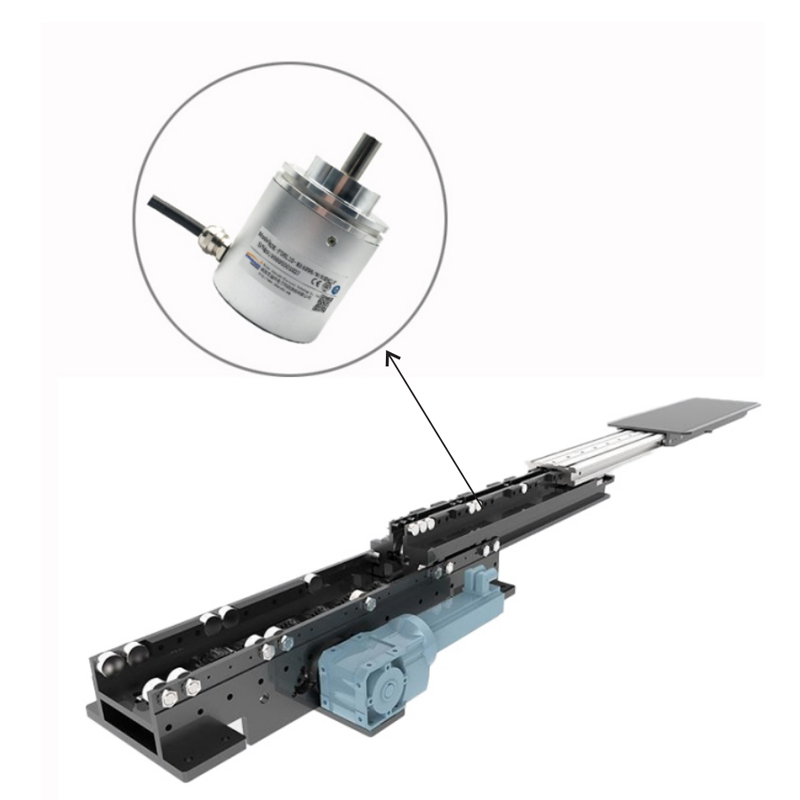
Uwendung vum Encoder am Teleskop Gabellift Zweck
Mooss d'Reesgeschwindegkeet, Echtzäit Positioun, a Lenkwénkel vum teleskopesche Gabellift; Virdeeler: Anti-Stéierungen an calibrable; Encoder Auswiel: Multi-Tour absolute Encoder;
Optional Kommunikatiounsprotokoll: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI, Parallel
Recommandéiert Modell: GMA-F58B10-1213-B4PNLP
Uwendung vum Encoder am schwéieren AGV Gefier
Zweck: Mooss d'Fuergeschwindegkeet, Echtzäit Positioun, a Lenkwinkel vun engem schwéieren AGV; Virdeeler: kompakt Struktur, héich Präzisioun, Anti-Interferenz, an héich Transmissioun Taux; Encoder Auswiel: Multi-Tour absolute Encoder, Pull-Draad Encoder;
Optional Kommunikatiounsprotokoll: CANopen.Modbus, Profibus, Profinet, EtherCAT, DeviceNet, SSI, parallel
Recommandéiert Modell:
GMA-F58L10 Serie, GI-D20 Serie, GMA-F58B10 Serie
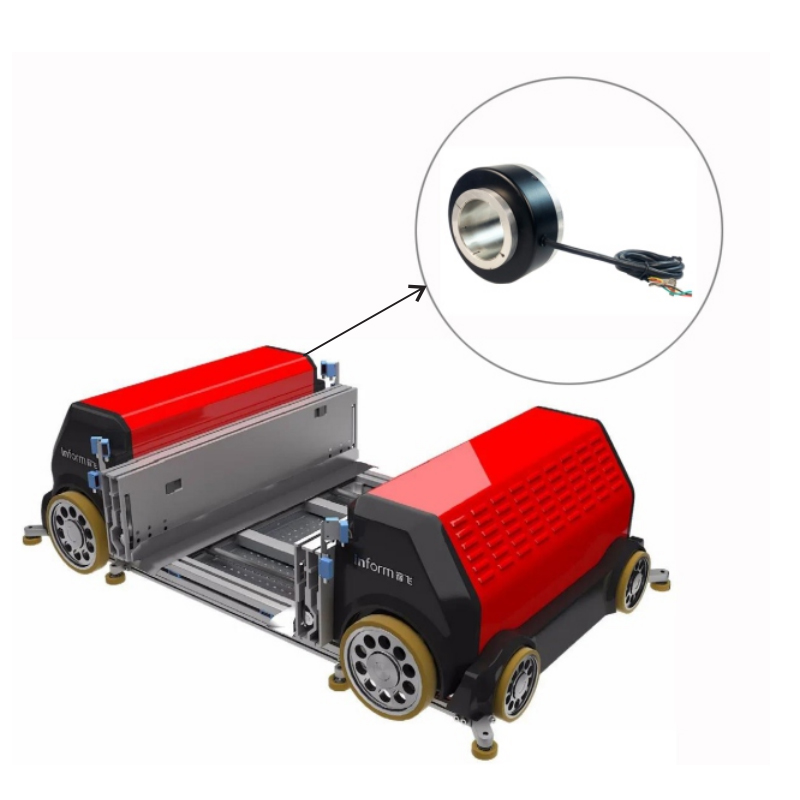
Uwendung vum Encoder am Shuttle Auto
Zweck: Miessung vun der Geschwindegkeet vum Shuttle Auto an de Lenkwénkel beim Tour; Encoder Auswiel: grouss huel inkrementell Encoder;
Optional Output Modus:NPN oppe Sammler, PNP oppe Sammler, Push-Pull Ausgang, Differentialausgang, Spannungsausgang
Encoder Auswiel Empfehlung
Recommandéiert Modell: GHI-80 Serie
Uwendung vun Encoder op Hoist Maschinn
Zweck: d'Positioun vum Hieft moossen; Virdeeler: Stabilitéit, héich Zouverlässegkeet, laang Liewen, staark Ëmweltresistenz; Encoder Auswiel: huel inkrementell Encoder;
Optional Output Modus: NPN Open Collector, PNP Open Collector, Push-Pull Output, Differential Output, Volt Output
Recommandéiert Modell: GHI-60 Serie
Uwendung vum Encoder am onbemannten Gabellift
Zweck: Mooss d'Héicht Héicht vun onbemannte Forklifts; Virdeeler: Präzisioun, Stabilitéit, kompakt Gréisst;
Encoder Auswiel:
Pull Drot Encoder; Optional Miesslängt: 500mm-10000mm; Optional Output Modus: NPN Open Collector, PNP Open Collector, Push-Pull Output, Differential Output, Volt Output
Absolute Encoder: CANopen.Modbus, Profibus, Profinet,, EtherCAT, DeviceNet, SSI, etc. Analog Ausgang: 4-20mA, 0-10v
Encoder Auswiel Empfehlung Recommandéiert Modell: ADK60 Serie